RunWay (11) 3차 실기기 테스트 & FlightPhase 복원
3차 간이 테스트 결과
distanceFilter = 5, distanceGap <= 2, β = 0.15 기본 세팅으로 걷기 + 100m 러닝을 간단히 테스트해봤다.
페이스 로딩이 너무 느렸고, 현재 페이스로 수렴하는 속도도 답답할 정도로 굼뜨게 반응했다.
β = 0.15가 과거 데이터를 85%나 유지하다 보니 새로운 속도 변화가 화면에 반영되기까지 시간이 너무 걸렸던 것이다.
AI 추천을 바탕으로 distanceGap <= 4, β = 0.25로 조정하기로 했다.
1
2
3
4
smoothingSpeedFirst = 0.75 * smoothingSpeedFirst + 0.25 * location.speed
smoothingSpeedSecond = 0.75 * smoothingSpeedSecond + 0.25 * smoothingSpeedFirst
return distanceGap <= 4 && timestampGap >= 5 ? true : false
위는 수정한 코드만 가져와봤다.
하지만 이것도 역시 슈퍼가면서 테스트해본 결과 되지 않았다.
그래서 이 부분에 대해 두 AI에게 의견을 물어봤다.
아래는 서로 반박한걸 다시 AI에게 정리를 하라고 한 내용이다.
AI-B의 의견 - IIR 버리고 SMA(이동 평균 큐)로 전환 + 타임아웃 PAUSE
AI-B는 30초 지연의 원인을 IIR 필터 자체의 구조적 한계로 진단했다. 초기값이 0인 상태에서 β = 0.25로 수렴하려면 수학적으로 10~15번 이상의 업데이트가 필요하고, distanceFilter = 5 환경에서는 그게 딱 30초에 해당한다는 것이다. 따라서 IIR을 버리고 최근 N개의 속도를 배열로 관리하는 SMA 방식으로 전환하고, PAUSE는 GPS 업데이트가 끊긴 지 5초가 지나면 자동 감지하는 타임아웃 방식을 제안했다.
AI-A의 의견 - IIR 유지 + 초기값 처리 수정 + ViewModel 타임아웃 PAUSE
AI-A는 IIR 자체의 문제가 아니라 초기값 처리의 허점이라고 반박했다. location.speed가 음수(-1)일 때도 초기화 조건을 통과해버리는 것이 문제이며, max(speed, 0)으로 음수를 보정하고 speed > 0일 때만 초기화하도록 수정하면 수렴 지연이 해결된다는 것이다. PAUSE는 Actor에 await로 매초 물어보는 대신 ViewModel이 마지막 데이터 수신 시각을 자체적으로 기록해 타이머 콜백에서 체크하는 방식을 제안했다.
AI-B의 재반박
AI-B는 ViewModel 타이머에서 매초 await runningCenter.checkPauseTimeout()을 호출하면 Actor 점유 문제로 데드락이 발생할 수 있다고 반박했다. 또한 guard location.speed > 0으로 데이터를 막아버리면 스트림이 끊겨 GPWS가 오작동할 수 있다고 지적했다.
AI-A의 재반박
AI-A는 Swift Actor의 for await 루프는 suspension point마다 Actor 점유를 해제하기 때문에 데드락이 발생하지 않는다고 반박했다. 또한 Actor를 전혀 호출하지 않고 ViewModel이 lastReceivedTime을 자체 변수로 관리하면 await 없이 타임아웃을 체크할 수 있어 구조적으로도 더 깔끔하다고 제안했다. guard return으로 스트림을 막는 대신 max(speed, 0)으로 음수만 보정해 흘려보내는 방식도 함께 제안했다.
AI-B의 최종 인정
Actor Reentrancy를 정확히 짚은 AI-A의 반박을 AI-B가 수용했다. 다만 초기값이 0일 때 speed > 0 조건 없이 초기화하는 허점은 여전히 남아있다고 지적했고, 최종적으로 두 AI의 의견이 수렴됐다.
최종 결론
- Smoothing: IIR 유지,
max(speed, 0)으로 음수 보정,smoothingSpeedFirst == 0 && speed > 0일 때만 초기화 - PAUSE: ViewModel 타이머 콜백에서
lastReceivedTime을 자체 체크. Actor 호출 없이 5초 타임아웃으로 감지
이제 이 결론을 가지고 코드를 수정해본다.
1. Smoothing 수정하기
현재 IIR은 유지한 상태에서 max(speed, 0)으로 음수 보정, smoothingSpeedFirst == 0 && speed > 0일 때만 초기화하는 걸로 결론이 났으니 적용해보도록 한다.
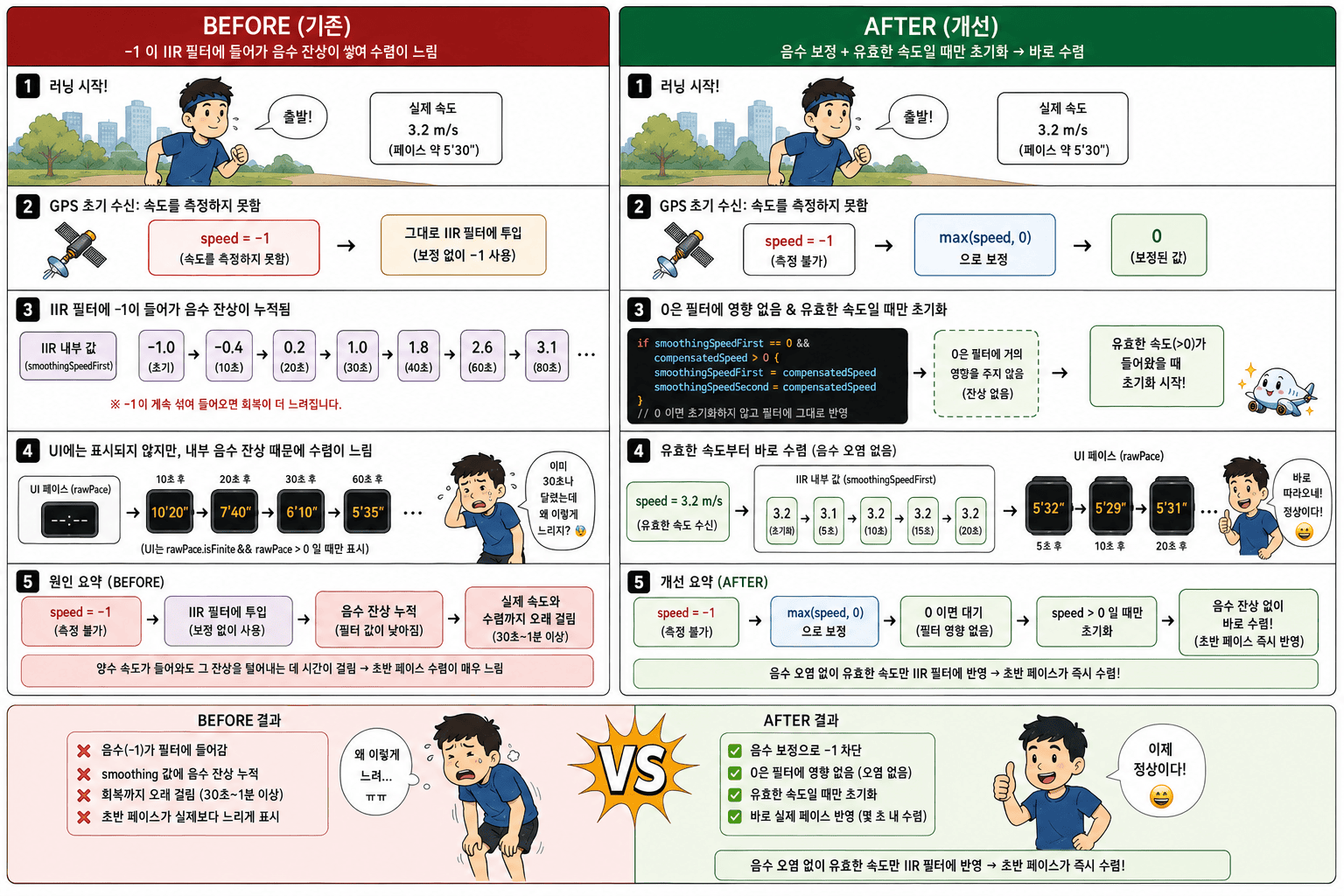
CLLocation.speed는 GPS가 속도를 측정하지 못했을 때 -1을 반환한다. 실제로 음수로 이동하는 게 아니라 Apple이 “측정 불가” 상태를 나타내기 위해 정해둔 값이다. Apple Developer Documentation - speed를 보면 이를 확인할 수 있다.
이 -1이 그대로 IIR 필터에 들어가면 smoothingSpeedFirst에 음수가 누적된다.
UI에는 rawPace.isFinite && rawPace > 0 조건으로 걸러져 표시되지 않지만, smoothing 변수 내부에는 음수 잔상이 쌓인 채로 있어서 이후 양수 speed가 들어와도 그 잔상을 털어내는 데 시간이 걸리게 된다.
이게 초반 페이스 수렴이 느렸던 원인이었다.
다시 돌아와서 일단은 위의 내용들이 자기네들끼리 내린 결론이라 가이드가 필요해서 달라고 했다…
가이드는 아래와 같다.
location.speed를max(speed, 0)으로 음수 보정- 기존
if smoothingSpeedFirst == 0조건에&& speed > 0추가 - smoothing 계산에서
location.speed→speed변수로 교체 rawPace계산은 그대로smoothingSpeedSecond기반으로 유지
이걸 기반으로 수정해본다. 우선 음수 보정을 위해 변수를 하나 만든다. (CoreLocation은 speed가 -1로 들어오는 경우가 있어 이를 0으로 보정한다.)
1
let compensatedSpeed = max(location.speed, 0)
이후 조건을 추가하고, 코드 블럭 내부도 음수 보정된 속도값으로 바꿔준다.
1
2
3
4
if smoothingSpeedFirst == 0 && compensatedSpeed > 0 {
smoothingSpeedFirst = compensatedSpeed
smoothingSpeedSecond = compensatedSpeed
}
IIR 필터 계산식에도 동일하게 적용한다.
1
2
smoothingSpeedFirst = 0.75 * smoothingSpeedFirst + 0.25 * compensatedSpeed
smoothingSpeedSecond = 0.75 * smoothingSpeedSecond + 0.25 * smoothingSpeedFirst
종합하면 이 부분만 바뀐 것이다.
1
2
3
4
5
6
7
8
9
let compensatedSpeed = max(location.speed, 0)
if smoothingSpeedFirst == 0 && compensatedSpeed > 0 {
smoothingSpeedFirst = compensatedSpeed
smoothingSpeedSecond = compensatedSpeed
}
smoothingSpeedFirst = 0.75 * smoothingSpeedFirst + 0.25 * compensatedSpeed
smoothingSpeedSecond = 0.75 * smoothingSpeedSecond + 0.25 * smoothingSpeedFirst
2. Pause 수정하기
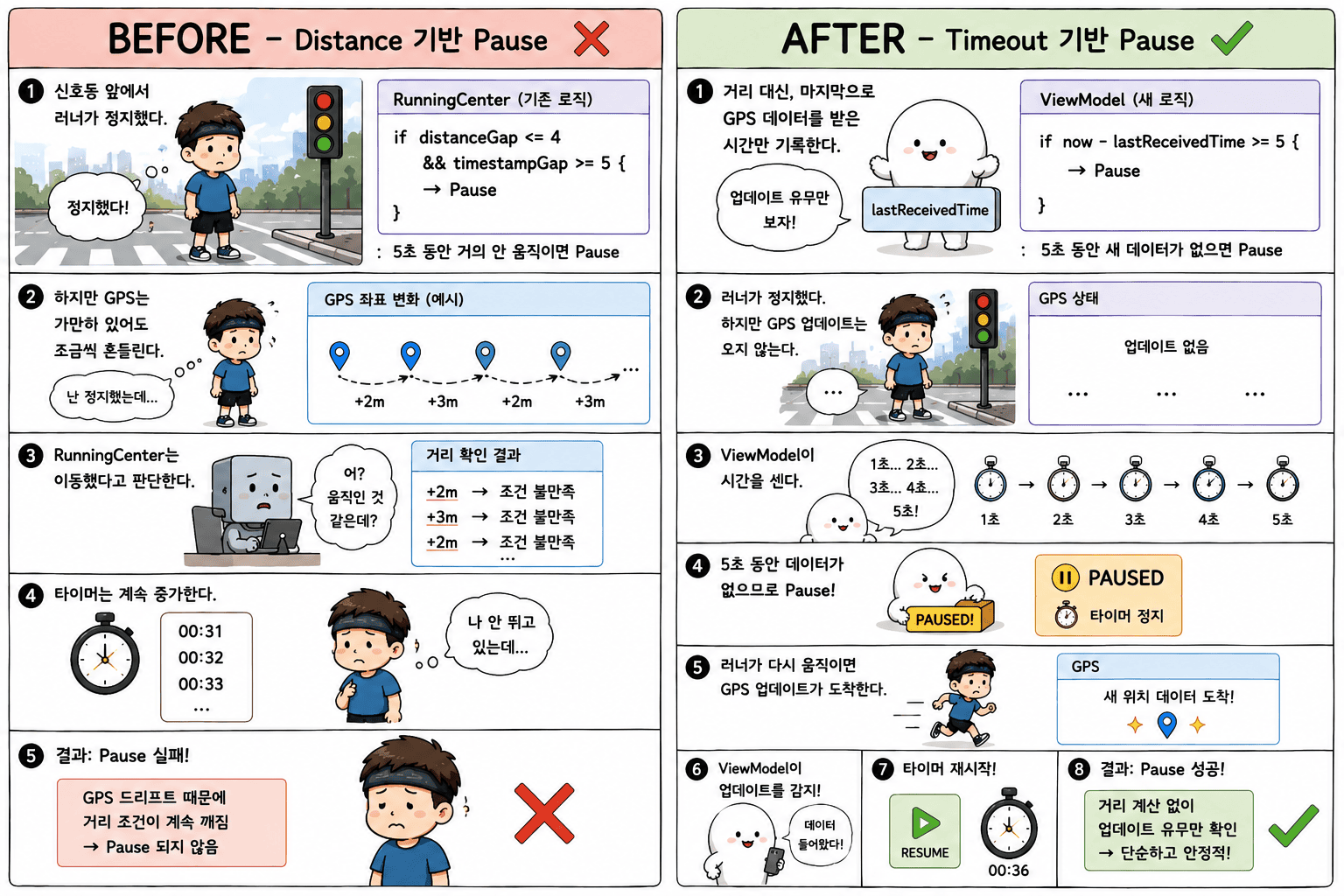
이제 Pause도 수정한다. 기존에는 거리 기반으로 움직이지 않을 경우를 감지하려 했는데, GPS는 값이 튀기도 하고 filter나 gap으로 제대로 인식하기가 어렵다 보니 시간 기반으로 방향을 바꾸게 됐다. 사실 이건 AI들끼리 이야기를 나누기 전에 혼자 생각해봤던 방법이긴 했다.
이것도 자기네들끼리 나눈 대화이다 보니 가이드를 달라고 했다.
- ViewModel에
lastReceivedTime: Date = .now변수 추가 startStream()에서 데이터 받을 때마다lastReceivedTime업데이트start()의 타이머 콜백에서 5초 이상 업데이트가 없으면 타이머 멈추기- 재개는
startStream()에서 데이터가 다시 들어올 때timerCancellable.isEmpty체크로 처리
가이드가 거의 답을 다 제시한 것 같긴 한데, 그래도 과정을 기록해본다.
먼저 마지막으로 데이터를 받은 시간을 기록할 변수를 만든다.
1
var lastReceivedTime: Date = .now
스트림으로 값을 받을 때마다 계속 업데이트되어야 하므로 startStream()에 추가한다.
1
2
3
4
5
6
7
func startStream() async {
for await data in await runningCenter.streamFlightData() {
self.flightData = data
lastReceivedTime = .now
//생략
}
}
이러면 스트림은 실시간으로 받긴 하지만, distanceFilter = 5 환경에서는 5m 이동했을 때만 위치 정보가 들어오므로 lastReceivedTime도 그 시점에 갱신된다.
그리고 start()의 타이머 콜백과 startStream()의 재개 타이머 콜백 둘 다 동일하게, 러닝 중이면서 5초 이상 업데이트가 없을 경우 구독을 취소해 타이머를 멈추게 한다.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
func start() {
isRunning = true
isPaused = false
locationService.startTracking()
timerCancellable.removeAll()
timerPublisher
.autoconnect()
.sink { [weak self] _ in
guard let self else { return }
elapsedTime += 1
if isRunning && Date().timeIntervalSince(lastReceivedTime) >= 5 {
timerCancellable.removeAll()
isPaused = true
}
}.store(in: &timerCancellable)
}
재개할 때는 데이터가 다시 들어오면 timerCancellable.isEmpty를 체크해서 타이머를 다시 시작한다. 이때도 5초 이상 업데이트가 없으면 다시 멈추도록 동일한 조건을 콜백 안에 넣어준다.
기존에 작성했던 data.isPaused는 이제 Actor에서 판단하는 방식이 아니기 때문에 지워준다. 관련된 detectPause() 함수와 FlightData의 isPaused도 함께 제거한다.
다만 PFDView에서 flightData.isPaused를 참조하던 부분이 에러가 나므로, ViewModel에 isPaused 플래그를 직접 관리해서 PFDView가 runViewModel.isPaused로 일시정지 뷰를 보여주도록 변경한다.
시작할 때는 false로 초기화, 5초 타임아웃 시 true, 데이터가 다시 들어오면 false로 되돌리는 구조다.
최종 수정 코드는 아래와 같다.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
func start() {
isRunning = true
isPaused = false
locationService.startTracking()
timerCancellable.removeAll()
timerPublisher
.autoconnect()
.sink { [weak self] _ in
guard let self else { return }
elapsedTime += 1
if isRunning && Date().timeIntervalSince(lastReceivedTime) >= 5 {
timerCancellable.removeAll()
isPaused = true
}
}.store(in: &timerCancellable)
}
func startStream() async {
for await data in await runningCenter.streamFlightData() {
self.flightData = data
lastReceivedTime = .now
isPaused = false
if timerCancellable.isEmpty {
timerPublisher
.autoconnect()
.sink { [weak self] _ in
guard let self else { return }
elapsedTime += 1
if isRunning && Date().timeIntervalSince(lastReceivedTime) >= 5 {
timerCancellable.removeAll()
isPaused = true
}
}.store(in: &timerCancellable)
}
}
}
func resetState() async {
isRunning = false
isModeA = false
isPaused = false // new
elapsedTime = 0
tempAlertArray = []
flightData = FlightData()
await runningCenter.reset()
}
이렇게 보완을 했지만 또 실기기테스트를 해봐야 할 것 같다.
새벽에 간단하게 테스트 해본결과 일단은 페이스가 초반에 잘 되는걸 확인했다. 또한 퍼즈도 잘되었다. 움직일때 알아서 퍼즈가 풀리기도 했다.
다만 페이스의 정확도는 조금 더 알아볼 필요가 있어보인다.
그래서 베타값은 0.2로 바꾸어서 다시 테스트를 해볼 생각이다.
LocationService 권한 거부 Alert 처리 (Combine PassthroughSubject)
현재 앱에서 에러 핸들링이 필요한 부분은 사실상 여기밖에 없다. 네트워크나 외부 API를 쓰지 않기 때문이다.
물론 이후 Watch 연동과 HealthKit을 사용하게 되면 추가 에러 핸들링이 필요하겠지만, 지금 당장은 LocationService의 didFailWithError와 locationManagerDidChangeAuthorization에서 콘솔로만 출력하던 부분을 Alert로 바꿔 사용자가 직접 알 수 있도록 한다.
모델링
이전 글의 Alert 방식을 착안하여 그대로 가져왔다.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
struct AlertItem: Identifiable {
let id = UUID()
let title: Text
let message: Text
let dismissButton: Alert.Button
}
struct AlertContext {
static let unableToGetLocations = AlertItem(
title: Text("Location Error"),
message: Text("Unable to retrieve your location.\nPlease try again."),
dismissButton: .default(Text("OK"))
)
// 나머지도 같은 방식이라 생략
}
이걸 Combine을 통해 View로 전달해 사용자가 직접 확인할 수 있게 만들 것이다.
LocationService 수정
기존에 print로만 처리하던 에러 케이스들을 수정한다.
1
2
3
4
5
6
7
8
9
10
11
12
func locationManager(_ manager: CLLocationManager, didFailWithError error: any Error) {
print(error)
}
func locationManagerDidChangeAuthorization(_ manager: CLLocationManager) {
switch manager.authorizationStatus {
case .restricted:
print("Location access restricted")
case .denied:
print("Location access denied")
}
}
우선 PassthroughSubject로 Publisher를 하나 만들어준다.
1
var alertPublisher = PassthroughSubject<AlertItem, Never>()
이후 각 케이스에서 send()로 해당 Alert를 흘려보낸다.
1
2
3
4
5
6
7
8
9
10
11
12
func locationManager(_ manager: CLLocationManager, didFailWithError error: any Error) {
alertPublisher.send(AlertContext.unableToGetLocations)
}
func locationManagerDidChangeAuthorization(_ manager: CLLocationManager) {
switch manager.authorizationStatus {
case .restricted:
alertPublisher.send(AlertContext.restrictedGetAuthorization)
case .denied:
alertPublisher.send(AlertContext.deniedGetAuthorization)
}
}
이렇게 보내는쪽의 준비는 끝이났다.
ViewModel 수정
View가 직접적으로 구독을 하는게 아니라 VM에서 구독을하여 View로 다시 전달을 하는 방향으로 코드 작성을 해본다.
그게 지금까지 해온 방식이며, 앞으로도 고수할 방식이다.
그래서 여기서 구독을 하도록 한다.
VM객체가 생성되자마자 구독을 하는게 좋기때문에 init()을 사용해서 구독을 하도록한다.
1
2
3
4
5
6
7
8
9
10
11
var alertItem: AlertItem?
init() {
// 생략
locationService.alertPublisher
.sink { [weak self] alert in
guard let self else { return }
self.alertItem = alert
}
.store(in: &cancellables)
}
이렇게 alertItem을 VM에서 관리하면 View는 단순히 alertItem이 세팅되는 걸 감지해서 Alert를 띄우기만 하면 된다. 에러 처리 로직이 VM에 집중되어 View가 깔끔해지는 구조다.
View 수정
이제 View에서 받아서 처리하면 된다.
고민이 필요한 부분은 어느 View에서 Alert를 보여줄 것인가다.
locationManagerDidChangeAuthorization에서 발생하는 권한 에러는 앱 진입 시점에 발생하므로 HomeView에서 처리한다.
반면 didFailWithError는 위치 업데이트 도중 발생하는 에러다. startUpdatingLocation()이 호출되는 시점은 러닝 시작 이후이므로 PFDView에서 Alert를 처리하는 게 맞다.
하지만 예상치 못한 문제가 발생했다.
기존에 사용하던 alert(item:content:)가 Deprecated되었다. 새로운 [alert(:isPresented:presenting:actions:message:)](https://developer.apple.com/documentation/swiftui/view/alert(:ispresented:presenting:actions:message:)-29bp4){:target=”_blank”}를 확인하니 방식이 바뀌면서 AlertItem의 title과 message도 Text가 아닌 String으로 변경이 필요하다.
재수정 (모델, VM)
방식이 바뀌면서 모델도 수정이 필요하다.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
struct AlertItem: Identifiable {
let id = UUID()
let title: String
let message: String
}
struct AlertContext {
static let unableToGetLocations = AlertItem(
title: "Location Error",
message: "Unable to retrieve your location.\nPlease try again."
)
// 생략
}
dismissButton을 제거하고 title, message를 String으로 변경했다.
VM에서는 didError 플래그를 추가해 Alert 트리거를 제어한다.
1
2
3
4
5
6
7
8
9
10
11
12
var didError = false
init() {
// 생략
locationService.alertPublisher
.sink { [weak self] alert in
guard let self else { return }
self.alertItem = alert
didError = true
}
.store(in: &cancellables)
}
alertItem이 세팅되는 동시에 didError = true로 바꿔 View의 isPresented를 트리거한다.
View 진짜 수정
우선 docs의 양식을 보고 그대로 차용한다.
1
2
3
4
5
6
7
8
9
10
.alert(runViewModel.alertItem?.title ?? "" ,
isPresented: Bindable(runViewModel).didError,
presenting: runViewModel.alertItem
) { details in
Button("OK") {
runViewModel.didError = false
}
} message: { item in
Text(item.message)
}
이때 didError가 @State가 아닌 일반 프로퍼티지만 RunViewModel이 @Observable을 준수하므로 Bindable을 사용할 수 있다.
Bindable Docs를 보면 @Observable을 준수하는 데이터 모델 객체의 mutable 프로퍼티에 바인딩을 만들기 위해 사용하는 것이라고 나와 있다. 즉 @State나 @Binding 없이도 Observable 객체의 프로퍼티를 $ 문법으로 바인딩할 수 있게 해주는 래퍼다.
docs의 예시는 대부분 @Bindable var model: MyModel 형태로 프로퍼티 래퍼를 직접 선언하는 방식이다. HomeView처럼 아직 RunViewModel을 많이 사용하지 않는 경우라면 이 방식도 가능하다.
하지만 @Environment처럼 이미 다른 방식으로 주입된 객체는 @Bindable을 다시 선언할 수 없다. PFDView가 바로 그 경우인데, 이미 여러 UI에서 runViewModel을 참조하고 있어 선언 방식을 바꾸기 어렵다.
이럴 때는 Bindable(runViewModel).didError처럼 인스턴스를 직접 감싸서 바인딩을 만드는 방식을 쓸 수 있다. 이후 HealthKit 연동 등 VM이 커질 것을 고려해 HomeView도 동일한 방식으로 통일했다.
그럼 이렇게 Alert가 잘 뜨는걸 알 수 있다.
FlightPhase 5단계 복원 (takeoff, approach)
현재는 아래와 같이 3단계로만 관리하고 있다.
1
2
3
4
5
enum FlightPhase {
case preflight
case cruise
case touchdown
}
사실 이 enum은 Week 2에서 만들어두었지만 실제로 쓰이지 않고 있었다. FlightData에 phase가 포함되어 있고 Actor에 updatePhase()도 있었지만, 어디서도 호출하는 곳이 없었던 것이다.
기능 구현을 우선하기 위해 3단계로 축소해뒀던 것인데, Dynamic Island 연동과 Watch 연동까지 생각하면 원래 계획대로 takeoff와 approach를 추가해야 할 시점이 됐다.
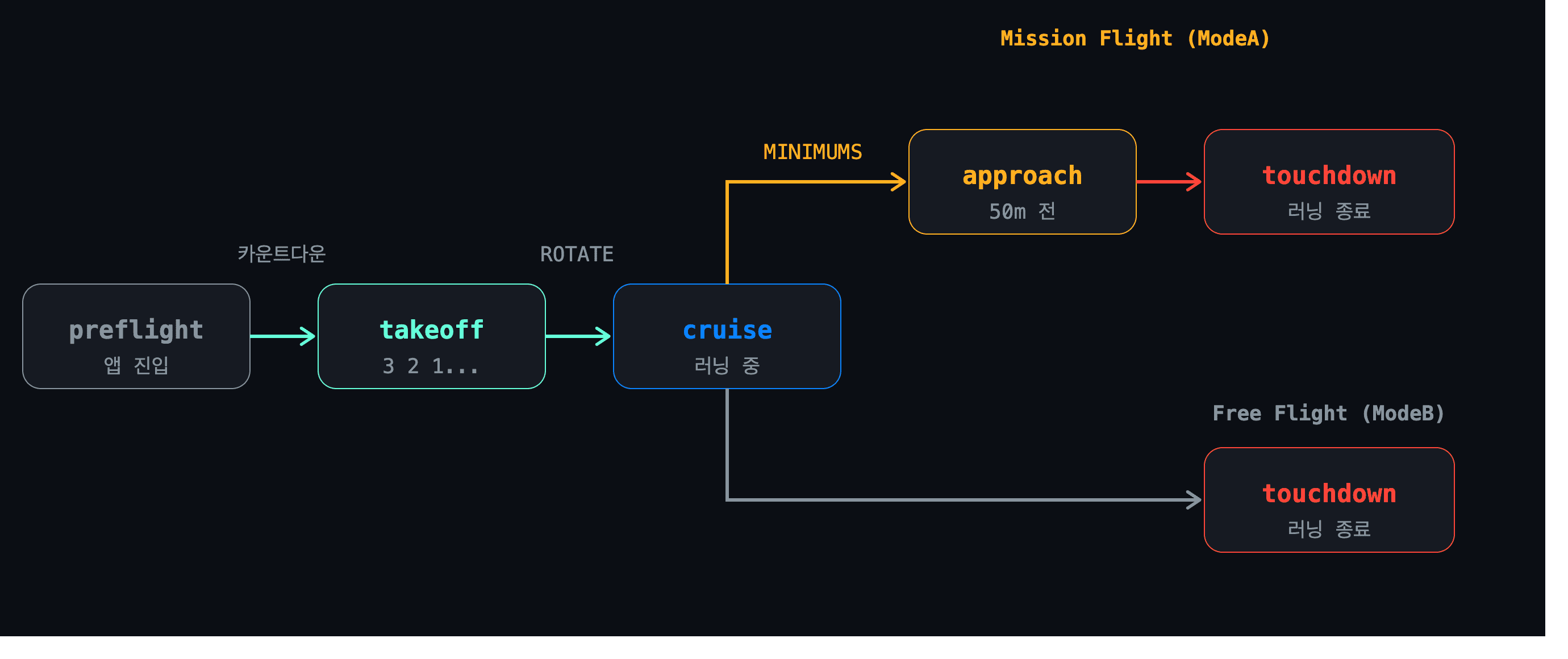
전환 시점을 정리하면, takeoff는 카운트다운이 시작되는 순간 전환되었다가 ROTATE 후 바로 cruise로 넘어간다. approach는 MINIMUMS가 트리거되는 시점에 함께 전환되며, ModeA에서만 사용된다. 유저가 종료하면 touchdown으로 바뀐다.
1
2
3
4
5
6
7
enum FlightPhase {
case preflight
case takeoff
case cruise
case approach
case touchdown
}
우선 이렇게 케이스를 추가해준다.
이제 어디서 추가할지에 대해 다시 포인트를 짚어보면
- TakeoffView에서 러닝 시작 시 takeoff → 바로 cruise
- RunningCentor의 MINIMUMS 트리거 시 approach
- TOUCHDOWN 시 touchdown
이렇게 된다.
즉 Phase는 기존과는 다른 Flow를 가지게 된다.
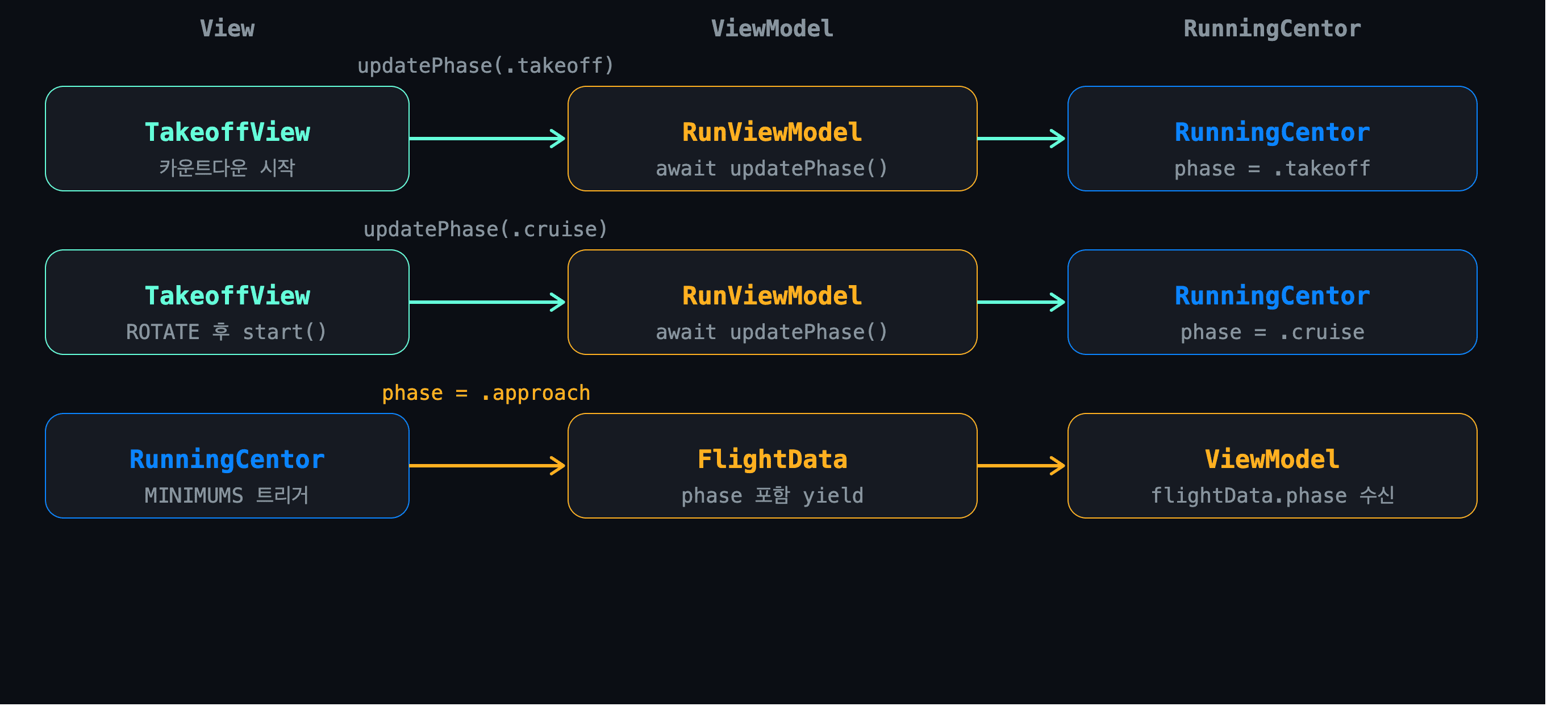
이렇게 View에서 Phase를 전달하고 VM이 받아 Actor로 전달하는 구조다.
Phase 전환은 유저가 View에서 버튼을 누르는 시점에 트리거되기 때문이다.
takeoff
러닝의 시작점이 어디인지를 생각해보면 TakeoffView의 카운트다운 버튼이다.
1
2
3
Button {
startCountdown()
}
즉 startCountdown() 내부에서 phase를 변경해줘야 한다.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
func startCountdown() {
countdownActive = true
countdownValue = 3
for i in 0..<5 {
DispatchQueue.main.asyncAfter(deadline: .now() + Double(i)) {
if i < 3 {
countdownValue = 3 - i
}
else if i == 3 {
countdownValue = 0
}
else {
countdownActive = false
navigateToPFD = true
runViewModel.start()
}
}
}
}
카운트다운이 시작되는 시점(i < 3)에 takeoff로, ROTATE 후 러닝이 실제로 시작되는 시점(else)에 cruise로 전환하면 된다.
그러기 위해선 VM에 Actor로 전달할 함수를 하나 만들어준다.
1
2
3
4
5
func updatePhase(_ phase: FlightPhase) {
Task {
await runningCenter.updatePhase(phase)
}
}
사실 updatePhase()는 Week 2에서 이미 만들어두었던 함수다. 당시 RunWay (5) RunningCenter Actor 포스팅에서 기본 틀만 잡아두고 “실제 동작 분기는 이후에 채워나갈 예정”이라고 했었는데, 오늘이 바로 그 시점이다.
이제 View에서 연결해주자.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
func startCountdown() {
countdownActive = true
countdownValue = 3
for i in 0..<5 {
DispatchQueue.main.asyncAfter(deadline: .now() + Double(i)) {
if i < 3 {
countdownValue = 3 - i
runViewModel.updatePhase(.takeoff) // new
}
else if i == 3 {
countdownValue = 0
}
else {
countdownActive = false
navigateToPFD = true
runViewModel.updatePhase(.cruise) // new
runViewModel.start()
}
}
}
}
생략하기 애매해서 전체 코드를 가져왔다. 카운트다운 시작 시점에 .takeoff, ROTATE 후 .cruise로 전환된다.
approach
approach는 ModeA에서만 사용된다. MINIMUMS가 트리거되는 시점이 바로 approach 진입 시점이므로 PFDView의 onChange에 조건을 추가해준다.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
// before
.onChange(of: runViewModel.flightData.gpwsStatus) { _, newValue in
if let status = newValue {
triggerGPWS(status)
if status != .normal && status != .minimums {
saveAlert()
}
}
}
// after
.onChange(of: runViewModel.flightData.gpwsStatus) { _, newValue in
if let status = newValue {
triggerGPWS(status)
if status == .minimums {
runViewModel.updatePhase(.approach)
}
if status != .normal && status != .minimums {
saveAlert()
}
}
}
touchdown
러닝이 종료될 때 phase를 touchdown으로 바꿔주면 된다.
PFDView의 TOUCHDOWN 버튼에서 종료 처리를 하고 있으므로 여기에 추가한다. 순서를 보장하기 위해 Task 안에 함께 넣어준다.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
// before
Button {
Task {
await saveRunningData()
await runViewModel.stop()
navigateToTouchdown = true
}
}
// after
Button {
Task {
await saveRunningData()
await runViewModel.stop()
runViewModel.updatePhase(.touchdown)
navigateToTouchdown = true
}
}
RunningCenter 수정하기
만들어뒀던 updatePhase()를 실제로 연결할 차례다.
1
2
3
func updatePhase(_ phase: FlightPhase) {
self.phase = phase
}
하지만 여기서 문제가 생긴다. 현재 FlightData는 processLocation() 내부에서만 yield되는 구조라, updatePhase()를 호출해도 다음 위치 업데이트가 오기 전까지는 View에 반영되지 않는다.
Dynamic Island에서 실시간으로 반영하려면 즉각적인 업데이트가 필요하다. 그런데 그러자니 FlightData 전체를 건드려서 값을 전달해야 한다.
FlightData 모델 수정
여기서 의문이 생겼다. FlightData에 phase가 있어야 할 이유가 있는가?
View에서 받긴 하지만 실제로 flightData.phase를 참조하는 곳이 없다. Phase는 궁극적으로 Dynamic Island 연동에서 필요한 부분이고, Watch에서는 페이스나 거리 같은 러닝 데이터가 필요하지 phase를 구분해서 보여줄 이유가 없다.
결론적으로 FlightData에서 phase는 필요없다고 판단해 제거하기로 했다.
1
2
3
4
5
6
7
8
9
struct FlightData {
var distance: Double = 0
var pace: Double = 0
var altitude: Double = 0
var heading: Double = 0
var gpwsStatus: GPWSState? = nil
var latitude: Double = 0
var longitude: Double = 0
}
Phase 실시간 스트림
Combine?
지금까지 Actor 외부의 실시간 스트림은 모두 Combine을 사용해왔다. Phase도 동일하게 적용해보려 했다.
1
2
3
4
5
6
var phasePublisher = PassthroughSubject<FlightPhase, Never>()
func updatePhase(_ phase: FlightPhase) {
self.phase = phase
phasePublisher.send(phase)
}
VM에서 이 스트림을 받아주려 했으나
1
2
3
4
5
6
7
8
9
10
var currentPhase: FlightPhase = .preflight
Task {
await runningCenter.phasePublisher
.sink { [weak self] phase in
guard let self else { return }
self.currentPhase = phase
}
.store(in: &cancellables)
}
1
Non-Sendable type 'PassthroughSubject<FlightPhase, Never>' of property 'phasePublisher' cannot exit actor-isolated context
에러가 발생했다. 근본적인 원인은 PassthroughSubject가 Sendable을 준수하지 않기 때문이다. Actor 격리 컨텍스트 밖으로 꺼낼 수 없는 것이다.
AsyncStream 사용
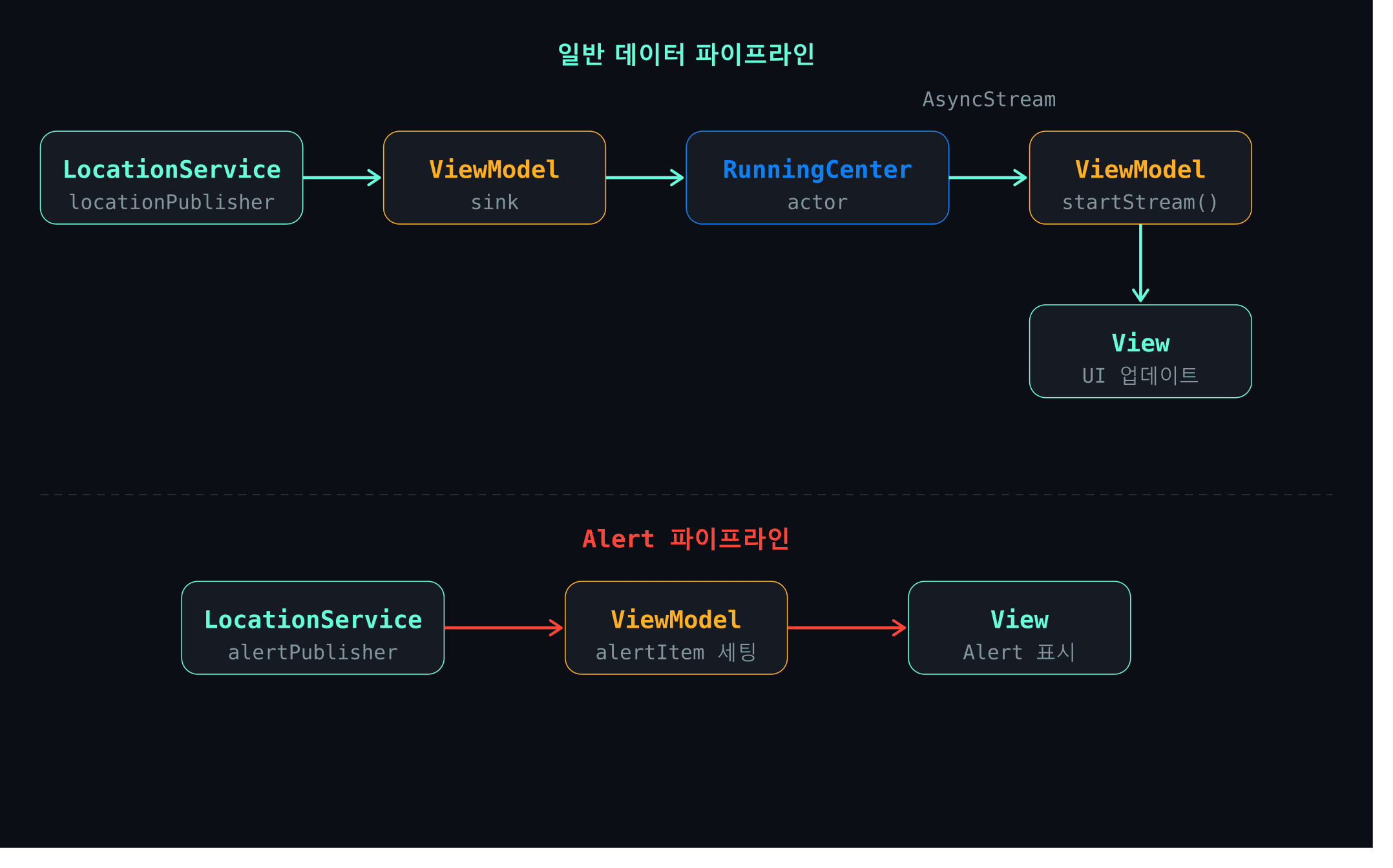
기존에 FlightData를 Actor에서 VM으로 전달할 때 이미 AsyncStream을 사용하고 있으니 Phase도 동일한 방식으로 가기로 했다.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
var phaseContinuation: AsyncStream<FlightPhase>.Continuation?
private func clearContinuation() {
continuation = nil
phaseContinuation = nil
}
func streamPhaseData() -> AsyncStream<FlightPhase> {
AsyncStream<FlightPhase> { continuation in
self.phaseContinuation = continuation
continuation.onTermination = { [weak self] _ in
Task {
await self?.clearContinuation()
}
}
}
}
func updatePhase(_ phase: FlightPhase) {
self.phase = phase
phaseContinuation?.yield(phase)
}
VM에서는 init()에서 바로 스트리밍을 열어준다. phase는 러닝 시작 전부터 변할 수 있기 때문이다.
1
2
3
4
5
6
7
8
init() {
// 생략
Task {
for await data in await runningCenter.streamPhaseData() {
self.currentPhase = data
}
}
}
러닝을 중단할 때 phase도 초기화해줘야 하므로 reset()에 추가한다.
1
2
3
4
5
6
7
8
9
10
11
12
// RunningCenter
func reset() {
totalDistance = 0
smoothingSpeedFirst = 0
smoothingSpeedSecond = 0
lastLocation = nil
coordinateArray = []
gpwsStatus = .normal
phase = .preflight
isReachedPace = false
modeAData = nil
}
문제 발생?
phase 변화를 확인하기 위해 print를 추가하고 실행해봤는데 에러가 발생했다.
1
2
3
4
5
6
Task {
for await data in await runningCenter.streamPhaseData() {
self.currentPhase = data
print(currentPhase)
}
}
1
Thread 1 Queue : com.apple.main-thread (serial)
알고 보니 PFDView를 수정하면서 .onChange 앞에 .을 빠뜨린 게 원인이었다. 빌드 에러 없이 통과했지만 크래시가 발생한 것이다.
점 하나를 추가하고 나서 출력이 정상적으로 됐다.
1
2
3
4
5
6
takeoff
takeoff
takeoff
cruise
approach
touchdown
하지만 이걸로 해결된 게 아니었다.
러닝 종료 후 다시 HomeView에서 러닝을 시작하려고 하니 버튼이 작동하지 않았다. 혼자 해결하려 했지만 되지 않아 AI의 도움을 받았는데, 이마저도 계속 안 되거나 작동은 되지만 NavigationStack 계층 구조 경고 메세지가 뜨는 등 해결하는 데 꽤 오래 걸렸다.
이 부분에 대해 문제를 AI를 통해 작성하게 했다.
아랫부분이 AI가 작성한 내용이다.
원인은 두 가지가 복합적으로 작용한 것이었다.
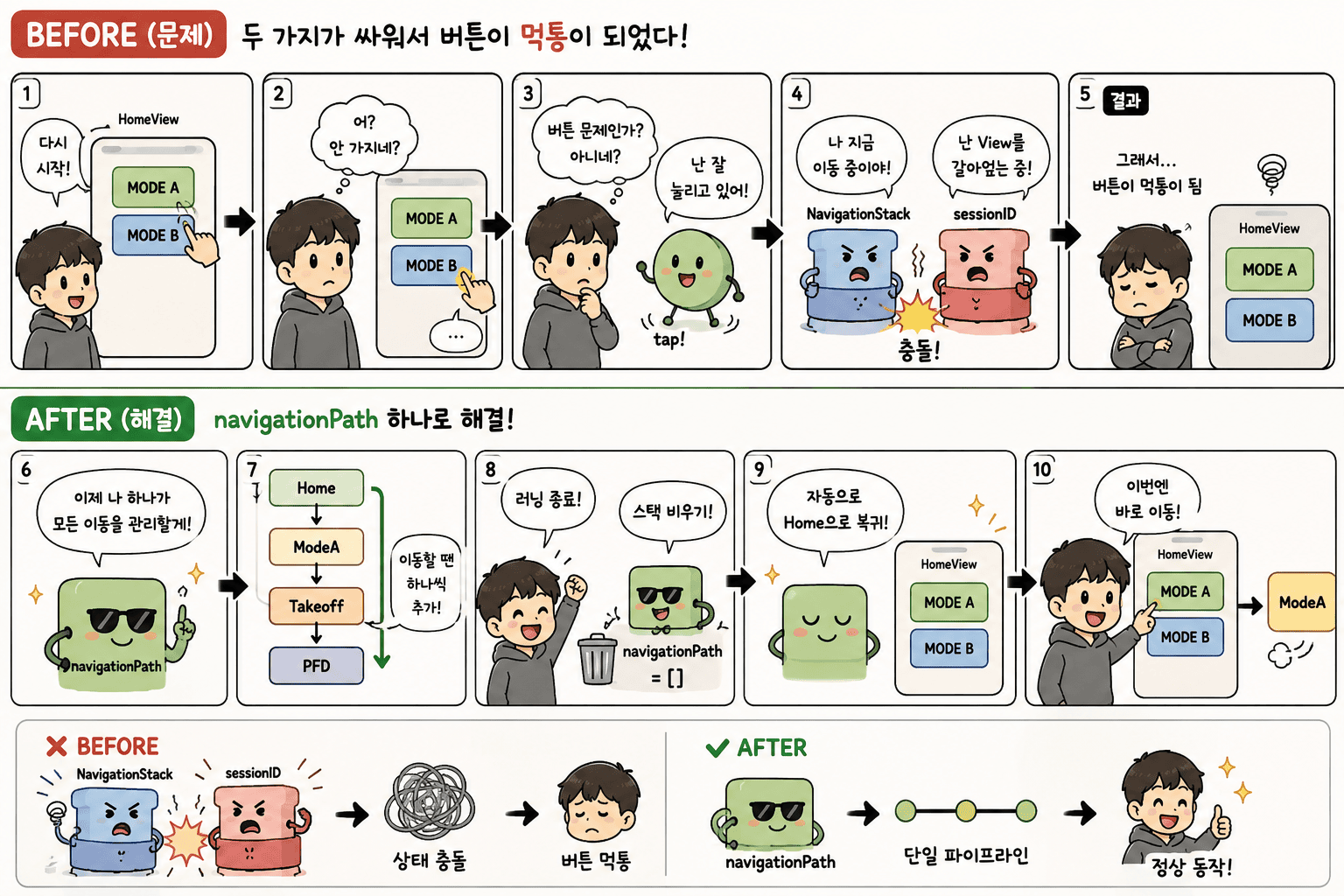
첫째, HomeView에서 Bindable(runViewModel).didError로 VM 전체를 바인딩한 것이 문제였다. Bindable(runViewModel)로 Observable 객체를 View dependency graph에 올리면서 HomeView가 runViewModel 전체 상태 변화에 간접적으로 영향을 받는 구조가 됐다. 본래 @Observable은 body에서 실제로 읽히는 프로퍼티만 추적해 재렌더링을 최소화하는 구조지만(WWDC23), Bindable을 통해 Observable 객체를 binding context로 올리면 객체 전체가 상태 그래프에 연결되는 효과가 생긴다. 러닝 중에는 flightData, elapsedTime, lastReceivedTime 등이 1초마다 계속 바뀌는데, 화면에 보이지 않는 백그라운드 상태의 HomeView가 이 변화에 간접적으로 반응해 지속적으로 재렌더링을 시도하고 있었던 것이다. 이 상태에서 AppState.shared.reset()으로 sessionID를 바꿔 뷰를 강제 재생성하면 NavigationStack 내부 상태가 꼬여 버튼이 먹통이 되었다.
둘째, AppState.sessionID 방식 자체의 구조적 한계였다. SwiftUI의 NavigationStack은 transition animation 중에도 view가 메모리에 남아 있는 상태 머신 기반 구조인데, sessionID 변경으로 root view를 강제로 재생성하면 animation이 참조하던 view identity가 소멸하면서 rendering transaction 불일치가 발생할 수 있다. Apple이 NavigationPath를 권장하는 이유도 view hierarchy를 파괴하지 않고 path 상태만 변경해 navigation을 제어하기 위해서다. (Understanding the Navigation Stack)
기존 방식과 새로운 방식을 비교하면 아래와 같다.
기존 (AppState.sessionID) | 새로운 (NavigationPath) | |
|---|---|---|
| 홈 복귀 방법 | sessionID 변경 → 뷰 강제 파괴 후 재생성 | navigationPath = [] → 스택 선언형 초기화 |
| 화면 전환 | 각 View의 @State Bool 플래그 | navigationPath.append() |
| 문제점 | 애니메이션 도중 부모 뷰 파괴 → Race Condition | 없음 |
| 아키텍처 | 두 개의 상태 제어 주체 (sessionID + @State) | 단일 파이프라인 (navigationPath) |
최종 해결책은 AppState 방식을 완전히 걷어내고 [FlightDestination] 열거형 배열 하나로 전체 네비게이션을 단일 파이프라인으로 관리하는 것이었다. NavigationStack(path:)에 이 배열을 바인딩해두면, resetState()에서 배열을 비우는 것만으로 SwiftUI가 선언형으로 루트인 HomeView까지 자동 복귀시켜 준다. 뷰를 강제로 파괴할 필요가 없으니 타이밍 충돌도 원천적으로 사라진다.
1
2
3
4
5
6
7
8
// RunViewModel
var navigationPath: [FlightDestination] = []
func resetState() async {
// ... 기존 초기화 ...
await runningCenter.reset()
navigationPath = [] // 배열을 비우면 HomeView(Root)로 자동 복귀
}
1
2
3
4
5
6
7
8
9
10
11
12
13
// HomeView
NavigationStack(path: $vm.navigationPath) {
// ...
.navigationDestination(for: FlightDestination.self) { destination in
switch destination {
case .modeA: ModeAView()
case .takeoff: TakeoffView()
case .pfd: PFDView()
case .touchdown: TouchdownView()
case .summary: FlightSummaryView(selectedFlight: nil)
}
}
}
각 View에서의 화면 전환은 runViewModel.navigationPath.append()로, 홈 복귀는 resetState()의 navigationPath = []로만 처리하는 단일 파이프라인 구조가 완성되었다.
이 패턴에 대해 Swift with Majid와 Medium 등에서도 enum 기반 NavigationPath 단일 파이프라인 구조를 소개하고 있다.
Dynamic Island FlightPhase 연동
미리 준비한 UI를 활용해 연동하려고 한다.
우선 Widget Extension 타겟을 추가한다.
타겟 추가 시 반드시 Live Activity를 체크해야 한다.
그리고 iPhone 앱 타겟의 Info.plist에 아래 키를 추가해야 한다. 추가하지 않으면 Activity.request()가 항상 실패한다.
1
2
<key>NSSupportsLiveActivities</key>
<true/>

에러가 하나 발생했다. FlightActivityService의 update() 내부에서 activity?.update()를 호출할 때 Race Condition 경고가 떴다.
1
2
3
4
func update(with newState: FlightActivityAttributes.ContentState) async {
let activity = self.activity
await activity?.update(.init(state: newState, staleDate: nil))
}
Activity 타입 자체가 non-Sendable이라 로컬 복사로도 해결이 안 됐고, @preconcurrency import ActivityKit으로 해결했다. Dynamic Island UI를 AI에게 맡긴 만큼 어쩔 수 없는 선택이었다.
그러다보니 Dynamic Island UI와 기본기능은 이미 완성된 상태였다.
그래서 지금은 UI보다 연동에 집중하기로 했다.
연동 순서
Dynamic Island와 연동할 포인트를 먼저 정리했다.
start()→startActivity()startStream()에서flightData받을 때 →updateCruise()TakeoffView카운트다운 →updateTakeoff()PFDViewGPWS 트리거 →updateGPWS(),clearGPWS()- MINIMUMS →
updateApproach() stop()→endActivity()
1. startActivity()
start()가 호출되는 시점이 러닝 시작이므로 여기서 Live Activity를 시작한다. ModeA라면 미션명과 목표 페이스를, ModeB라면 “FREE FLIGHT”와 기본값을 넘긴다.
getModeData()에서 Actor에 데이터를 넘길 때 VM에도 함께 저장해두어야 start() 시점에 modeAData를 참조할 수 있다.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
var modeAData: ModeA?
func getModeData(_ data: ModeA) {
isModeA = true
modeAData = data
Task {
await runningCenter.setModeAData(data)
}
}
func start() {
isRunning = true
isPaused = false
locationService.startTracking()
timerCancellable.removeAll()
let missionName = isModeA ? "MISSION FLIGHT" : "FREE FLIGHT"
let targetPace = isModeA ? PaceFormatter.format(modeAData?.targetPace ?? 0) : "--'--\""
flightActivityService.startActivity(missionName: missionName, targetPace: targetPace)
// 생략
}
2. updateCruise
Dynamic Island에 실시간 데이터를 전달하는 함수다.
startStream()에서 flightData를 받을 때마다 updateCruise()를 호출해 페이스와 거리를 업데이트한다.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
func startStream() async {
for await data in await runningCenter.streamFlightData() {
self.flightData = data
lastReceivedTime = .now
isPaused = false
Task {
await flightActivityService.updateCruise(
pace: PaceFormatter.format(data.pace),
distance: data.distance,
heartRate: 0
)
}
// 생략
}
}
await로 직접 호출하면 업데이트가 끝날 때까지 다음 데이터를 받지 못하므로 Task로 분리해 스트림이 블로킹되지 않도록 했다.
3. updateTakeoff
카운트다운 시 Dynamic Island도 함께 카운트되도록 연동한다.
TakeoffView의 카운트다운 로직에 추가해주면 된다.
1
2
3
4
5
6
7
if i < 3 {
countdownValue = 3 - i
runViewModel.updatePhase(.takeoff)
Task {
await runViewModel.flightActivityService.updateTakeoff(countdownValue: 3 - i)
}
}
flightActivityService가 private으로 선언되어 있어 View에서 접근이 불가능했기 때문에 지워주었다.
4. updateGPWS, clearGPWS, updateApproach
PFDView의 GPWS 상태 변화를 감지하는 onChange에 Dynamic Island 업데이트를 함께 연동한다. 상태에 따라 세 가지로 분기한다.
.normal: GPWS 해제 →clearGPWS()로 Dynamic Island를 정상 상태로 복귀.minimums:approachphase 전환 +updateApproach()로 50m 남은 것을 표시.sinkRate,.overspeed: Alert 저장 +updateGPWS()로 경고 상태 표시
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
.onChange(of: runViewModel.flightData.gpwsStatus) { _, newValue in
if let status = newValue {
triggerGPWS(status)
switch status {
case .normal:
Task {
await runViewModel.flightActivityService.clearGPWS()
}
case .minimums:
runViewModel.updatePhase(.approach)
Task {
await runViewModel.flightActivityService.updateApproach(remainingMeters: 50)
}
case .sinkRate, .overspeed:
saveAlert()
Task {
await runViewModel.flightActivityService.updateGPWS(type: status)
}
}
}
}
5. updateTouchdown
PFDView의 TOUCHDOWN 버튼을 누르는 시점의 flightData를 Dynamic Island에 전달한다.
stop()이 호출되면 resetState()에서 데이터가 초기화되기 때문에, stop() 이전에 미리 값을 캡처해두는 것이 핵심이다.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
Button {
Task {
let distance = runViewModel.flightData.distance / 1000
let time = PaceFormatter.secondToTime(runViewModel.elapsedTime)
let avgPace = PaceFormatter.format((Double(runViewModel.elapsedTime) / 60) / (runViewModel.flightData.distance / 1000))
await saveRunningData()
await runViewModel.stop()
runViewModel.updatePhase(.touchdown)
await runViewModel.flightActivityService.updateTouchdown(
distance: distance,
elapsedTime: time,
avgPace: avgPace
)
runViewModel.navigationPath.append(.touchdown)
}
}
6. endActivity
Dynamic Island를 종료한다.
TOUCHDOWN 직후보다 FlightSummaryView에서 GO TO DECK을 누를 때 종료하는 게 자연스럽다고 판단했다. 러닝 결과를 확인하는 동안 Dynamic Island에 최종 기록이 유지되기 때문이다.
1
2
3
4
5
6
Button {
Task {
await runViewModel.flightActivityService.endActivity()
await runViewModel.resetState()
}
}
resetState() 이전에 endActivity()를 먼저 호출해야 한다. resetState()가 실행되면 navigationPath가 비워지면서 홈으로 복귀하는데, 그 전에 Live Activity를 정리해주는 순서가 맞다.
이렇게 각 포인트에 연동을 마쳤다.
다만 셋업 과정에서 몇 가지 문제가 있었다.
첫째, startActivity()를 start() 안에서 호출하고 있었는데, TakeoffView의 카운트다운 시작 시점에 먼저 호출해야 카운트다운과 Dynamic Island가 동기화된다는 것을 뒤늦게 파악했다. start()에서 호출을 제거하고 startCountdown() 안으로 옮겼다.
둘째, start() 호출 시 lastReceivedTime을 리셋하지 않아 출발하자마자 PAUSE가 되는 문제가 있었다. lastReceivedTime = .now를 start() 첫 줄에 추가해서 해결했다.
셋째, 앱 재실행 후 이전 Live Activity가 시스템에 남아 있어 visibility 에러로 새 Activity 시작이 실패하는 경우가 있었다. startActivity() 앞에 기존 Activity를 먼저 종료하는 코드를 추가하고, RunViewModel의 init()에서도 앱 시작 시 정리하도록 했다.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
// init()
Task {
for activity in Activity<FlightActivityAttributes>.activities {
await activity.end(nil, dismissalPolicy: .immediate)
}
}
// startActivity
func startActivity(missionName: String, targetPace: String) async {
guard ActivityAuthorizationInfo().areActivitiesEnabled else {
print("⚠️ Live Activities 비활성화됨")
return
}
for act in Activity<FlightActivityAttributes>.activities {
await act.end(nil, dismissalPolicy: .immediate)
}
// 생략
}
실내에서 간단히 테스트해봤으나 GPS 데이터가 느리게 잡혀 cruise 전환 확인은 실외 테스트가 필요하다.
간단하게 테스트 후 발견한 문제
- Dynamic Island 에서 km인데 실제 숫자의 단위는 m를 기준으로 표시
updateCruise()에서distance를 미터로 넘기고 있었는데, Dynamic Island UI는 km 기준으로 표시하고 있었다./1000으로 변환해서 전달하도록 수정했다.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
Task {
await flightActivityService.updateCruise(
pace: PaceFormatter.format(data.pace),
distance: data.distance / 1000, // modified
heartRate: 0
)
}
case .cruise:
// 거리
VStack(spacing: 1) {
Text("DISTANCE")
.font(.system(size: 8))
.foregroundColor(.white.opacity(0.5))
HStack(alignment: .lastTextBaseline, spacing: 2) {
Text(String(format: "%.2f", state.distance))
// 생략
}
}
- GPWS 조건에 만족해야만 MINIMUMS도 트리거됨
- 기존 코드에서
isReachedPace가false면calculateGPWSStatus()자체를 호출하지 않아 MINIMUMS도 울리지 않는 문제가 있었다. MINIMUMS는 거리 기반이라 페이스 도달 여부와 무관하게 트리거되어야 하므로 별도로 분리했다.
- 기존 코드에서
1
2
3
4
5
6
7
8
9
// processLocation
let targetDistanceM = modeAData?.targetDistance ?? 0 * 1000
if totalDistance >= targetDistanceM - 50 && totalDistance < targetDistanceM {
gpwsStatus = .minimums
} else if isReachedPace {
gpwsStatus = calculateGPWSStatus(rawPace)
} else {
gpwsStatus = .normal
}